潮汐监测传感器
1、产品概述 潮汐监测传感器是一款专为海洋潮汐水位测量设计的毫米波雷达传感器。该传感器采用FMCW(频率调制连续波)模式,具有非接触式安装设计,体积小巧、结构紧凑、精度高
1、产品概述
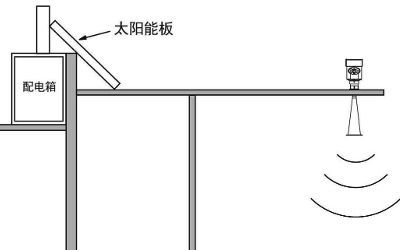
潮汐监测传感器是一款专为海洋潮汐水位测量设计的毫米波雷达传感器。该传感器采用FMCW(频率调制连续波)模式,具有非接触式安装设计,体积小巧、结构紧凑、精度高、功耗低、抗干扰能力强的特点。适用于沿海潮汐监测、港口水位管理、海洋环境研究以及防洪预警等场景,能够稳定应对复杂多变的海洋环境。
潮汐监测传感器是一款专为海洋潮汐水位测量设计的毫米波雷达传感器。该传感器采用FMCW(频率调制连续波)模式,具有非接触式安装设计,体积小巧、结构紧凑、精度高、功耗低、抗干扰能力强的特点。适用于沿海潮汐监测、港口水位管理、海洋环境研究以及防洪预警等场景,能够稳定应对复杂多变的海洋环境。
2、产品主要参数指标
|
参数
|
符号
|
最小值
|
典型值
|
最大值
|
单位
|
说明
|
|
发射频率
|
ƒ
|
77
|
|
81
|
GHz
|
带宽4G
|
|
输出功率(EIRP)
|
Pout
|
|
13
|
20
|
dBm
|
|
|
波束宽度(-3dB)
|
|
|
|
|
|
|
|
- 水平方向
|
|
|
6
|
|
°
|
|
|
- 垂直方向
|
|
|
6
|
|
°
|
|
|
工作电压
|
VCC
|
9
|
12
|
24
|
V
|
|
|
工作电流
|
ICC
|
|
20
|
|
mA
|
典型值
|
|
输出方式
|
|
|
|
|
|
RS485通讯,默认波特率115200,支持ASCII/Modbus协议自由切换
|
|
工作温度
|
TOP
|
-45
|
|
+85
|
℃
|
|
|
外形尺寸
|
|
|
Φ66x96 mm
|
|
|
直径×高度
|
|
重量
|
|
|
212 g
|
|
|
|
|
测量指标
|
|
|
|
|
|
|
|
- 测距范围
|
|
0.1
|
|
40
|
m
|
最大测量范围
|
|
- 测量精度
|
|
|
±2
|
|
mm
|
|
|
- 分辨率
|
|
|
1
|
|
mm
|
|
|
- 启动时间
|
|
|
100
|
|
ms
|
最快启动时间
|
说明:
雷达工作频段为80GHz,最大测距范围为40米,受目标物体的RCS(雷达散射截面)影响,实际探测距离可能有所偏差。
出厂默认配置兼容ASCII和MODBUS两种协议,用户可根据相应指令自由切换模式(详细协议文件请向我司索取)。
3、产品特点
非接触式设计: 无需直接接触水面,避免海水腐蚀和机械磨损,延长使用寿命。
高精度测量: 提供±2mm的测量精度和1mm的分辨率,满足潮汐监测的高精度需求。
抗干扰能力强: 毫米波技术有效应对海浪、雾气和雨水的干扰,确保数据稳定可靠。
低功耗运行: 典型工作电流仅20mA,适合长期野外部署和太阳能供电场景。
紧凑便携: 直径66mm、高度96mm的轻量化设计,重量仅212g,便于安装和维护。
4、应用场景
潮汐监测: 实时监测沿海地区的潮汐变化,为海洋研究和航运安全提供数据支持。
港口管理: 精确测量港口水位,优化船舶调度和码头运营。
防洪预警: 监测异常水位变化,及时预警风暴潮或海啸风险。
环境研究: 支持海洋生态和气候变化相关研究,提供长期水位数据。
5、接口与接线定义
接口定义:
1:V+(正电源)
2:V-(负电源)
3:485A(RS485通讯A线)
4:485B(RS485通讯B线)
通讯方式: RS485接口,默认波特率115200,支持ASCII/Modbus协议切换,方便集成到现有系统中。
对接协议:
1. MODBUS-RTU指令
雷达工作频段为80GHz,最大测距范围为40米,受目标物体的RCS(雷达散射截面)影响,实际探测距离可能有所偏差。
出厂默认配置兼容ASCII和MODBUS两种协议,用户可根据相应指令自由切换模式(详细协议文件请向我司索取)。
3、产品特点
非接触式设计: 无需直接接触水面,避免海水腐蚀和机械磨损,延长使用寿命。
高精度测量: 提供±2mm的测量精度和1mm的分辨率,满足潮汐监测的高精度需求。
抗干扰能力强: 毫米波技术有效应对海浪、雾气和雨水的干扰,确保数据稳定可靠。
低功耗运行: 典型工作电流仅20mA,适合长期野外部署和太阳能供电场景。
紧凑便携: 直径66mm、高度96mm的轻量化设计,重量仅212g,便于安装和维护。
4、应用场景
潮汐监测: 实时监测沿海地区的潮汐变化,为海洋研究和航运安全提供数据支持。
港口管理: 精确测量港口水位,优化船舶调度和码头运营。
防洪预警: 监测异常水位变化,及时预警风暴潮或海啸风险。
环境研究: 支持海洋生态和气候变化相关研究,提供长期水位数据。
5、接口与接线定义
接口定义:
1:V+(正电源)
2:V-(负电源)
3:485A(RS485通讯A线)
4:485B(RS485通讯B线)
通讯方式: RS485接口,默认波特率115200,支持ASCII/Modbus协议切换,方便集成到现有系统中。
对接协议:
1. MODBUS-RTU指令
|
寄存器
|
读写
|
参数含义
|
指令
|
备注
|
|
0x0000
|
R/-
|
空高
|
01 03 00 00 00 01 84 0A
|
单位:cm滤波后数据,测距时,读空高即可
测水位时,需要提前设置安装高度。读取到的水位值=安装高度-空高,私有协议下的数据是空高数据 |
|
0x0001
|
R/-
|
空高
|
01 03 00 01 00 01 D5 CA
|
单位mm,滤波后数据
|
|
0x0002
|
R/-
|
水位
|
01 03 00 02 00 01 25 CA
|
单位cm,滤波后数据
|
|
0x0003
|
R/-
|
水位
|
01 03 00 03 00 01 74 0A
|
单位mm,滤波后数据
|
|
0x0004
|
R/-
|
信号强度
|
01 03 00 04 00 01 C5 CB
|
大于30dB信号好
|
|
0x0005
|
R/W
|
安装高度
|
01 03 00 05 00 01 94 0B
01 06 00 05 [AA] [BB] [CC] [DD] |
单位:cm雷达到水底的距离,水位等于安装高度减去空高。要读水位,首先设置安装高度。
|
|
0x270F
|
R/-
|
心跳寄存器
|
01 03 27 0F 00 01 BE BD
|
每读取一次数值加1,判断雷达是否正常工作。
|
|
0x03E7
|
-/W
|
切换到私有协议
|
01 06 03 E7 55 AA 86 96
|
切换到私有协议保持现有波特率
|
|
0x03E7
|
-/W
|
切换到私有协议
|
01 06 03 E7 55 BB 46 9A
|
切换到私有协议恢复原有波特率
|
|
0x3E8
|
R/-
|
测距输出值
|
01 03 03 E8 00 01 04 7A
01 03 03 E8 00 02 44 7B |
(滤波后,单位为mm)滤波后数据干扰更小,变化更慢,高16bit
|
|
0x3E9
|
R/-
|
测距输出值
|
01 03 03 E9 00 01 55 BA
|
(滤波后,单位为mm)滤波后数据干扰更小,变化更慢,低16bit
|
|
0x3EA
|
R/-
|
测距输出值
|
01 03 03 EA 00 01 A5 BA
01 03 03 EA 00 02 E5 BB |
(滤波前,单位为mm)滤波前数据会有干扰,变化较快,高16bit
|
|
0x3EB
|
R/-
|
测距输出值
|
01 03 03 EB 00 01 F4 7A
|
(滤波前,单位为mm)滤波前数据会有干扰,变化较快,低16bit
|
|
0x3F4
|
R/W
|
设备地址
|
01 03 03 F4 00 01 C5 BC
01 06 03 F4 [AA] [BB] [CC] [DD] |
范围:0x01-0xFD支持广播0xFF
|
|
0x3F6
|
R/W
|
波特率调整
|
01 03 03 F6 00 01 64 7C
01 06 03 F6 [AA] [BB] [CC] [DD] |
48 96 144 192 384 560 576 1152 1290
读,写波特率,为实际波特率/100 |
|
0x3F7
|
R/W
|
切换到空高自动模式
|
01 03 03 F7 00 01 35 BC
01 06 03 F7 [AA] [BB] [CC] [DD] |
写入0关闭空高自动,写入1打开空高自动。
|
|
0x3F8
|
R/W
|
恢复背景建模
|
01 06 03 F8 55 AA B7 50
|
|
|
0x041E
|
-/W
|
雷达重启
|
01 06 04 1E 00 01 29 3C
|
重启必要时重启雷达
|
|
0x07D1
|
R/W
|
距离跳变
|
01 03 07 D1 00 01 D5 47
01 06 07 D1 [AA] [BB] [CC] [DD] |
范围:0x01-0xFF当距离跳变 大于 DeltaR 时,输出保持原值
|
|
0x07D2
|
R/W
|
距离跳变
|
01 03 07 D2 00 01 25 47
01 06 07 D2 [AA] [BB] [CC] [DD] |
范围:0x01-0xFF当跳变发生,当跳变的帧数大于 DeltaT 时,更新输出值为新值
|
|
0x07D4
|
R/W
|
量程
|
01 03 07 D4 00 01 C5 46
01 06 07 D4 00 [AA] [BB] [CC] |
默认:0X0A,单位m最大量程与产品型号有关
|
|
0x07D5
|
R/W
|
中频增益AGC
|
01 03 07 D5 00 01 94 86
01 06 07 D5 00 [AA] [BB] [CC] |
0自动,1-11固定增益,最小值为0,最大值为11
|
|
0x07D6
|
R/W
|
盲区参数设置
|
01 03 07 D6 00 01 64 86
01 06 07 D6 00 [AA] [BB] [CC] |
范围0x01-0xFF单位0.01米
|
|
0x07D7
|
R/W
|
发射功率
|
01 03 07 D7 00 01 35 46
01 06 07 D7 00 [AA] [BB] [CC] |
最小值为7,最大值为0
|
|
0x07D8
|
R/W
|
初始值矫正
|
01 03 07 D8 00 01 05 45
01 06 07 D8 00 [AA] [BB] [CC] |
范围0x01-0xFF,01相当于增加1mm,02增加2mm;FF相当于减去1mm,FE减去2mm
|
|
0x07D9
|
R/W
|
灵敏度调整:
|
01 03 07 D9 00 01 54 85
01 06 07 D9 00 [AA] [BB] [CC] |
范围1-20,值越小越灵敏
|
|
0x07DA
|
R/W
|
采样率调整
|
01 03 07 DA 00 01 A4 85
01 06 07 DA 00 [AA] [BB] [CC] |
范围0x01-0xFF,修改采样率可以调整雷达功耗
|
|
0x07DB
|
R/W
|
频谱搜索模式
|
01 03 07 DB 00 01 F5 45
01 06 07 DB 00 [AA] [BB] [CC] |
模式切换:4,峰值搜索,5,域值搜索
|
|
0x07DC
|
R/W
|
背景建模
|
01 03 07 DC 00 01 44 84
01 06 07 DC 00 [AA] [BB] [CC] |
8:关闭背景差9:开启背景差 10:重建背景
重建背景,一定要先打开背景差模式,否则不保存 |
|
0x07DD
|
R/W
|
设置滤波队列长度
|
01 03 07 DD 00 01 15 44
01 06 07 DD 00 [AA] [BB] [CC] |
范围:0x08-0xFF
出厂默认值:128 滤波缓冲队列时长=滤波队列长度/采样率 滤波初始输出时间=滤波队列长度/采样率/4 滤波队列长度由小变大时需要等待队列内数据补充至1/4时才有数值输出,长度由大变小时无需等待。 |
|
0x07DE
|
R/W
|
0-255
|
|
背景建模时剔除距离值1,单位0.1米,在建模时剔除该值前后各0.5米的回波信号,用线性插值表示,设置为0时不剔除任何区域。
|
|
0x07DF
|
R/W
|
0-255
|
|
背景建模时剔除距离值2
|
|
0x07E0
|
R/W
|
0-255
|
|
背景建模时剔除距离值3
|
|
0x07E1
|
R/W
|
0-255
|
|
背景建模时剔除距离值4
|
|
0x07E2
|
R/W
|
0-255
|
|
背景建模时剔除距离值5
|
|
0x07E3
|
R/W
|
0-255
|
|
背景建模时剔除距离值6
|
|
0x07E4
|
R/W
|
0-255
|
|
背景建模时剔除距离值7
|
|
其他说明:
1、读写功能码03,写单个寄存器06,默认地址是:1 2、数据格式: 8N1 效验: CRC16 (多项式A001) 3. 以上寄存器编号是十进制的,需要转换成十六进制,通过MODBUS协议操作这些寄存器 例如打开域值搜索模式,我们需要发送01 06 07 DB 00 05 38 86 第一字节,设备地址 第二字节,功能码0x03读取寄存器的值,0x06改写寄存器的值 第三四字节,寄存器地址 第五六字节,功能码位0x03时:要读取的寄存器个数 功能码位0x06时:要存入寄存器的数据 第七八字节,CRC校验 当我们需要写寄存器时,会存在[AA] [BB] [CC] [DD] 这些参数,需要根据需求确定这些参数的值 |
||||
2. 私有协议:
1)设置命令1:07 F5 0B AA BB CC DD EE FF GG HH II JJ KK
推荐默认参数:07 F5 0B 00 FF 01 80 0A 00 01 07 00 05 64(LDRR01 120GHz)
推荐默认参数:07 F5 0B 00 FF 01 80 0A 00 01 07 00 05 64(LDRR03 120GHz)
推荐默认参数:07 F5 0B 00 FF 01 80 28 00 0A 07 00 10 64(LDRR04 80GHz)
推荐默认参数:07 F5 0B 00 FF 01 80 4B 00 14 07 00 10 64(LDRR08 24GHz)
读取已设参数:07 F5 0B 00 00 00 00 00 00 00 00 00 00 00
AA输出格式:8bit无符号数,设置范围0x00-0X01,0x00>两列输出,0x01>六列数据输出,该参数断电不保存。
BB距离跳变DeltaR阈值:8bit无符号数,设置范围0x01-0xFF,单位mm,当距离跳变大于DeltaR时,输出保持原值,除非达到DeltaT阈值。
CC距离跳变DeltaT阈值:8bit无符号数,设置范围0x01-0xFF,跳变帧计数,当跳变发生,且跳变的帧数大于DeltaT时,更新输出值为新值。
DD设置滤波队列长度:8bit无符号数,设置范围0x08-0xFF。
EE量程设置:8bit无符号数,设置范围0x00-0x4B,出厂默认值根据不同型号确认。
FF中频增益:8bit无符号数,设置范围0x00-0x08,0x00为自动增益,0x01-0x08为固定增益,倍数为1,2,4,8,16,32,64,128,如果需要高精度测量,需要调整到合适固定增益。
GG盲区设置:8bit无符号数,设置范围0x00-0xFF,单位0.01米,可配置最小盲区内的干扰信号。
HH发射功率:8bit无符号数,设置范围0x01-0x07,07发射功率最小,01最大。
II距离修正:8bit无符号数,设置范围0x00-0xFF,调整单位1mm。例如:01增加1mm,02增加2mm。FF减1mm,FE减去2mm。
JJ CFAR值:8bit无符号数,设置范围0x01-0xFF,此参数可以降低读取数值的灵敏度,遇到有干扰比较多,可适当增加。
KK刷新率:8bit无符号数,设置范围0x00-0xFF,0x01 0.1fps,0x64 10fps。此参数设置,雷达探测输出数据变化,可以有效降低功耗。一般不用设置。
2)设置命令2:07 F5 08 00 01 02 03 04 05 06 07
切换至MODBUS协议,返回Switch to Modbus Mode... Done,命令可掉电保存
3)设置命令3:07 F6 08 [AA] [BB] [CC] [DD] [EE] [FF] [GG] [HH]
[AA]:bit0:0:关闭背景差
[AA]:Bit0:1:开启背景差
[AA]:Bit1:0:峰值搜索模式,(默认)。
[AA]:Bit1:1:首波模式
[AA]:Bit6:0:不读回【07 F6 08】的配置信息
[AA]:Bit6:1:回送【07 F6 08】的配置信息
[AA]:Bit7:0:保持原背景不变,不重建背景,[BB] [CC] [DD] [EE] [FF] [GG] [HH]参数无效。
[AA]:Bit7:1:重建背景
[BB]~[HH]:背景建模剔除距离值,单位0.1米,在建模时剔除设置值前后各0.5米回波信号,用线性插值代替。
示例及说明:
1,07 F6 08 83 16 1B 00 00 00 00 00(背景学习,一定要打开背景差开关)首波模式,开背景差,重建背景。重建时剔除2.2±0.5米和2.7±0.5米的两个范围。如果设置区域重复,则合并成一个剔除区,[1.7---2.7]U[2.2…3.2]=[1.7…3.2]
2,07 F6 08 00 00 00 00 00 00 00 00(关闭首波模式,关闭背景差模式)
3,07 F6 08 40 00 00 00 00 00 00 00(查询工作模式参数)
4,峰值搜索模式下,打开背景差,重建背景,可以有效降低盲区信号杂波比。
5,07 F6 08 20 00 00 00 00 00 00 00 (回送频谱数据),Begin……….End。 共4096行,第一列是频谱(原始频谱,未作背景差学习)第二列是背景(若未建背景,默认为0。)
6,以HEX格式读取 全部频谱
4)设置命令4:07 F6 08 08 00 00 00 00 00 00 00
以HEX格式读取 FFT起点到量程终点频谱
5)设置命令5:07 F6 08 04 00 00 00 00 00 00 00
雷达回复:
Begin
[A0.MSB][A0.LSB][B0.MSB][B0.LSB]
[A1.MSB][A1.LSB][B1.MSB][B1.LSB]
[An.MSB][An.LSB][Bn.MSB][Bn.LSB]
End
A是频谱(原始频谱,未做背景差),B是背景(如果未建背景,默认为0),全部回读时,n=4096;部分回读时,n与设置的雷达探测范围相关。